For nearly a decade, most commercial drone operations in the United States have operated under visual line of sight (VLOS) rules. When operators needed to fly beyond visual line of sight (BVLOS), for infrastructure inspection, surveying, or public safety, they had to obtain individual waivers from the Federal Aviation Administration (FAA). While this waiver-based system allowed early experimentation, it was never designed to support large-scale commercial drone operations.
That reality is now changing.
The FAA has proposed Part 108, a regulatory framework designed to normalize BVLOS operations across the National Airspace System (NAS). Instead of relying on case-by-case approvals, the rule introduces a structured, performance-based system that enables routine BVLOS flights while maintaining safety in the airspace.
Just as important, the rule recognizes that scaling drone operations requires more than regulatory approval. It requires digital infrastructure to coordinate aircraft operating at low altitude. This is where UAS Traffic Management (UTM) and automated airspace data services enter the picture.
Together, Part 108 and UTM represent the foundation for scalable drone operations in the United States.
From Waivers to a Scalable Framework
Since the introduction of Part 107 in 2016, most BVLOS missions have required special waivers or exemptions from the FAA. Each waiver demanded that operators demonstrate how they would mitigate risks to people, property, and other airspace users.
While effective for limited operations, the process is resource-intensive and difficult to scale. Each new mission requires regulatory review, documentation, and approval. As commercial drone adoption expands across industries including energy, utilities, transportation, agriculture, and public safety, the waiver model becomes increasingly impractical.
The FAA’s Part 108 proposal aims to solve this problem by establishing a repeatable regulatory framework for BVLOS operations.
Instead of requesting individual waivers, operators would follow standardized regulatory pathways that define how aircraft, operators, and supporting systems must perform to ensure safe flight.
The proposed rule enables a wide range of commercial applications, including:
- Infrastructure inspection
- Aerial surveying and mapping
- Agricultural monitoring
- Package delivery
- Public safety missions
By replacing ad hoc approvals with clear operational standards, Part 108 creates the regulatory foundation necessary for routine BVLOS operations.
The Operational Structure of Part 108
One of the most significant aspects of Part 108 is its two-tier operational approval structure, which separates lower-risk operations from more complex missions.
Permitted Operations
Lower-risk operations may qualify for operational permits, allowing operators to conduct BVLOS missions under a streamlined regulatory pathway.
These operations may include activities such as infrastructure inspections or surveying in lower-density environments.
Certificated Operations
More complex missions, such as those involving larger aircraft, higher operational complexity, or operations over populated areas, would require operational certification.
Certificated operators would be subject to additional oversight and would need to implement more comprehensive safety management processes.
A Shift Toward Organizational Accountability
Another major change proposed under Part 108 is the shift in responsibility from individual remote pilots to the operating organization.
Instead of relying solely on a single pilot responsible for each aircraft, the rule introduces structured operational roles such as:
- Operations Supervisor, responsible for overall mission safety
- Flight Coordinator, responsible for monitoring individual aircraft and intervening if necessary
This approach reflects the reality that many future drone operations will involve multiple aircraft operating simultaneously, supported by automated systems and centralized oversight.
In other words, the regulatory model begins to resemble modern aviation operations, where organizations, not individuals, manage complex flight systems.
Why BVLOS Requires a New Airspace System
Regulatory reform alone cannot enable scalable drone operations.
The fundamental challenge lies in airspace coordination.
Traditional air traffic control (ATC) was designed to manage crewed aircraft operating at higher altitudes and lower traffic density. It is not designed to coordinate thousands of low-altitude drones operating simultaneously across cities, infrastructure corridors, and rural environments.
Most drone operations occur below 400 feet above ground level, often outside direct ATC management. As drone traffic increases, relying on manual coordination becomes impractical.
To safely integrate large numbers of unmanned aircraft into the airspace, a new approach is required. This approach is based on digital coordination and automated data exchange.
This concept is known as UAS Traffic Management (UTM).
Understanding UTM and Automated Data Services
UAS Traffic Management (UTM) refers to a digital ecosystem designed to manage drone traffic at low altitudes.
Instead of relying on human air traffic controllers to coordinate each flight, UTM systems use networked software services to manage traffic flow, monitor aircraft positions, and prevent conflicts between aircraft operating in the same airspace. UTM is not intended to replace traditional air traffic control (ATC). Instead, it complements ATC by supporting low-altitude drone operations that typically occur outside direct ATC oversight.
Under the FAA’s proposed Part 108 framework, the agency introduces a regulatory pathway for entities called Automated Data Service Providers (ADSPs). These providers would be regulated under a separate proposed rule, Part 146, which establishes certification and operational requirements for organizations that deliver automated airspace data services.
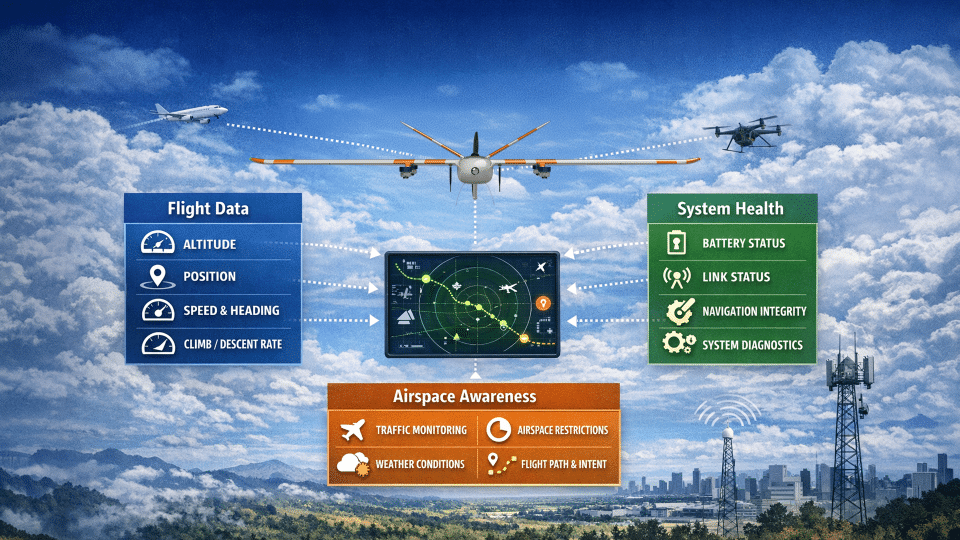
ADSPs would provide critical capabilities that support safe and scalable BVLOS operations, including:
- Strategic deconfliction ensuring planned flight paths do not conflict before missions begin
- Conformance monitoring verifying that aircraft remain within their approved flight paths
- Traffic awareness sharing aircraft position information with operators and other systems
- Airspace status updates providing real-time information about restrictions, hazards, and airspace conditions
In practice, this means drone operators would interact with a digital ecosystem where flight plans are submitted, validated, and monitored through automated services.
These services form the operational backbone of UTM systems, enabling safe coordination between many aircraft operating simultaneously.
The Role of Remote Identification
Another critical component supporting scalable drone operations is Remote Identification (Remote ID). Remote ID is essentially a digital license plate for drones. It requires drones to broadcast identification and location information during flight, so regulators, law enforcement, and others can identify aircraft and operators.
The broadcast message includes things like:
- Drone identifier
- Aircraft location and altitude
- Velocity
- Control station or takeoff location
The system is broadcast locally and is primarily intended to enable identification and regulatory oversight.
What This Means for Industry
The introduction of Part 108 and UTM represents more than regulatory change. It signals the emergence of a new operational model for unmanned aviation.
Routine BVLOS Operations
Operators will no longer need to pursue individual waivers for many missions. Instead, they will operate under standardized regulatory pathways designed for repeatable operations.
Multi-Aircraft Operations
Organizations will be able to supervise multiple aircraft simultaneously, dramatically improving operational efficiency.
Autonomous Aerial Networks
Perhaps most significantly, the new framework enables the creation of persistent aerial monitoring networks capable of covering vast geographic areas.
Examples include:
- Long-range infrastructure inspection along power lines or pipelines
- Statewide transportation monitoring networks
- Rapid-response public safety surveillance
- Commercial delivery systems
These systems rely not only on aircraft technology but also on the digital infrastructure that coordinates them.
The Road Ahead
The FAA’s BVLOS rulemaking represents a pivotal moment for the unmanned aviation industry.
Part 108 is designed to move drone operations from experimental deployments toward routine, scalable integration within the National Airspace System.
Achieving this vision will require collaboration across manufacturers, operators, regulators, and service providers. Aircraft must meet evolving safety expectations; organizations must develop operational expertise, and new digital infrastructure must emerge to support traffic coordination.
But the trajectory is clear.
The future of unmanned aviation will not be defined by individual drone flights. It will be defined by integrated aerial intelligence systems operating safely and persistently across the airspace.
Part 108 and UTM provide the regulatory and technological foundations that make that future possible.